18
№2 (54) • 2017
ОРТОПЕДИЯ
РУБРИКА
2
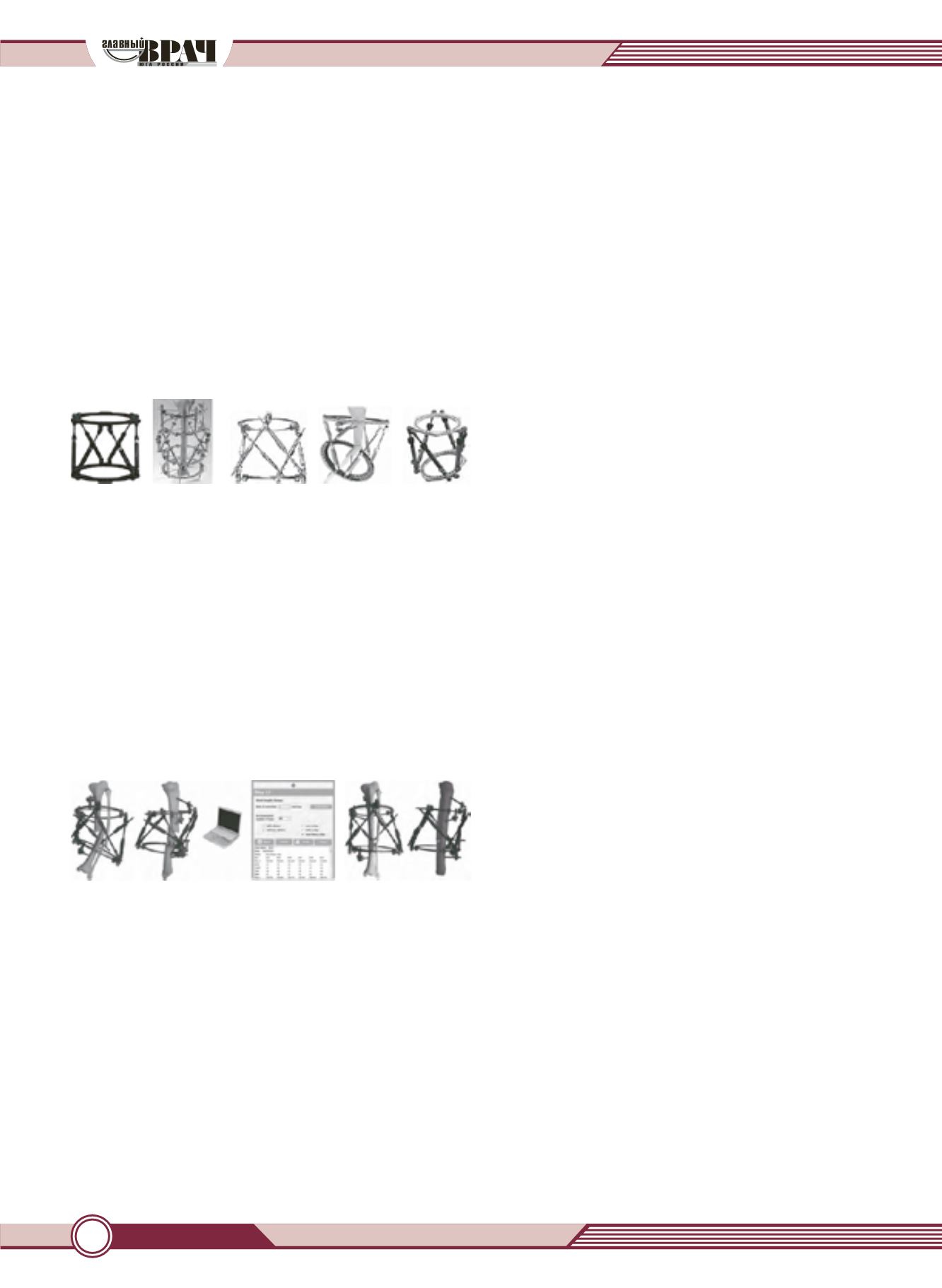
Гексаподы— это аппараты на основе пассивной ком-
пьютерной навигации [9, 10, 12, 13, 17]. Гексаподы по-
зволяют одноэтапно устранить сложную многокомпо-
нентную многоплоскостную деформацию, выполнить
математически точную репозицию перелома без пере-
монтажа репозиционных узлов.
На данный момент в клинической практике нахо-
дят применение следующие гексаподы: аппарат Taylor
Spatial Frame (TSF) (США), Ilizarov Hexapod Apparatus
(IHA) (Германия), аппарат Орто-СУВ (Россия), аппарат
Smart-correction (Турция—США), аппарат TL-Hex (США)
(рис. 1).
Многочисленные
исследования
свидетельствуют
о том, что все указанные аппараты повышают точность
коррекции деформаций и уменьшают время пребывания
ваппарате.
а
б
в
г
д
Рис. 1. Ортопедические гексаподы, используемыев клинической
практике: a— аппаратTaylor Spatial Frame (TSF); б— аппарат
IlizarovHexapodApparatus (IHA); в— аппаратОрто-СУВ; г—
аппаратSmart-correction; д— аппаратTL-Hex.
Аппарат Орто-СУВ (Россия) является представите-
лем этой группы инновационных устройств. Как и все
гексаподы, он состоит из основной (базовой) и мобиль-
ной (перемещаемой) опор, которые соединены шестью
телескопическими стержнями специальной конструк-
ции— стратами. Таким образом, аппарат Орто-СУВ по-
зволяет устранять деформацию одновременно в трех
плоскостяхзаодинэтапибезкаких-либоперемонтажей
[1, 16] и может эффективно применяться при коррекции
деформацийдлинных костей [1, 6, 7] (рис. 2).
а
б
в
Рис. 2. Принцип работы гексаподаОрто-СУВ: а— исходное
положение костныхфрагментов соответствует исходнойдлине
страт; б— после введения необходимых данных программа
рассчитывает изменениедлин каждой из страт; в— после
расчетногоизменениядлин страт положение костных
фрагментов становитсядолжным.
Следует отметить, что все гексаподы и прилагающи-
еся к ним компьютерные программы не лишены ряда
недостатков, которые невозможно устранить путем из-
менения данных аппаратов и программ [14]. Как част-
ный случай, не лишен недостатков и Орто-СУВ. Основ-
ной из них— его некоторая громоздкость. За пределы
корпусов страт и кольцевых опор выступают платики
и резьбовые стержни, что приносит дискомфорт паци-
енту в процессе коррекции деформации. Шкала страты
отражает величину изменения ее длины. Определение
абсолютной длины страт требует специальных измере-
ний.Изменениедлинстратнаэтапахкоррекциитребует
постоянноговрачебногомониторинга. Отсутствиенеоб-
ходимости замены типоразмеров страт имеет обратную
сторону — необходимость проведения так называе-
мой процедуры «реверса», что может быть выполнено
в большинстве случаев только специалистом-ортопе-
дом [2].
В 1-м травматологическом отделении МБУЗ ГБСМП
г. Ростова-на-Дону аппаратОрто-СУВ со свойствамипас-
сивной компьютерной навигации для лечения больных
сдеформациямидлинныхтрубчатыхкостейприменяется
с 2011 года. Показаниями для его использования явля-
ются:
•
врожденные и приобретенные диафизарные
и метадиафизарные деформации длинных
трубчатых костей любой степени сложности;
•
многоплоскостные деформации среднего
и заднего отделов стоп;
•
стойкие контрактуры и застарелые вывихи
и подвывихи локтевого, лучезапястного,
коленного и голеностопного суставов;
•
сложные переломы длинных костей.
Предоперационное планирование является осново-
полагающим этапом коррекции деформации и долж-
но проводиться на основе телерентгенограмм (пано-
рамных рентгенограмм) деформированной и здоровой
конечностей для возможности оценки референтных
линий и углов (РЛУ) и сравнения их с должными вели-
чинами. После определения вершины деформации вы-
бирают уровень остеотомии и моделируют коррекцию
деформации.
При планировании коррекции деформации мы ис-
пользуем следующий алгоритм:
•
1. Проведение анатомических осей каждого
из костныхфрагментов;
•
2. Проведение линий проксимального
и дистального суставов;
•
3. Сравнение величин проксимального
и дистального эпидиафизарных (анатомических)
углов с должными величинами;
•
4. Определение вершин деформации;
•
5. Выбор места остеотомии;
•
6. Моделирование коррекции деформации;
•
7. Проведение механической оси;
•
8. Сравнение механических углов с должными
величинами.
Подобный алгоритм выполнялся последовательно
дляфронтальной и сагиттальной плоскостей.
Всем пациентам с деформациями в поврежденных
сегментах выполнялись:
•
Панорамная рентгенограмма
(телерентгенограмма) нижних конечностей в двух
стандартных проекциях (рис. 3).


